1. Kio estaspaŝomotoro?
Paŝmotoroj moviĝas alimaniere ol aliaj motoroj. Paŝmotoroj de kontinua kurento uzas malkontinuan movadon. Estas pluraj bobengrupoj en iliaj korpoj, nomataj "fazoj", kiuj povas esti rotaciitaj per aktivigo de ĉiu fazo sinsekve. Unu paŝon samtempe.
Per stirado de la paŝomotoro per la regilo/komputilo, vi povas precize poziciigi ĝin je preciza rapideco. Pro ĉi tiu avantaĝo, paŝomotoroj ofte estas vaste uzataj en ekipaĵoj, kiuj postulas precizan moviĝon.
Paŝmotoroj havas multajn malsamajn grandecojn, formojn kaj dezajnojn. Ĉi tiu artikolo specife klarigos kiel elekti paŝmotoron laŭ viaj bezonoj.

2. Kiuj estas la avantaĝoj depaŝomotoroj?
A. Poziciigo- Ĉar la movado de paŝomotoroj estas preciza kaj ripetema, ili povas esti uzataj en diversaj precize kontrolitaj produktoj, kiel 3D-presado, CNC, fotilplatformo, ktp., iuj diskoj ankaŭ uzas paŝomotoron por poziciigi la legkapon.
B. Rapido-kontrolo- precizaj paŝoj ankaŭ signifas, ke vi povas precize regi la rotacian rapidon, taŭga por plenumi precizajn agojn aŭ robotan kontrolon
C. Malalta rapideco kaj alta tordmomanto- Ĝenerale, kontinukurentaj motoroj havas malaltan tordmomanton je malaltaj rapidoj. Sed paŝomotoroj havas maksimuman tordmomanton je malaltaj rapidoj, do ili estas bona elekto por malalt-rapidaj kaj altprecizaj aplikoj.
3. Malavantaĝoj depaŝomotoro :
A. Neefikeco- Male al motoroj de kontinua kurento, la konsumo de paŝomotoroj ne multe rilatas al la ŝarĝo. Kiam ili ne funkcias, ankoraŭ estas kurento tra ili, do ili kutime havas problemojn pri trovarmiĝo, kaj la efikeco estas pli malalta.
B. Tordmomanto ĉe alta rapideco- kutime la tordmomanto de la paŝomotoro ĉe alta rapideco estas pli malalta ol ĉe malalta rapideco, iuj motoroj ankoraŭ povas atingi pli bonan rendimenton ĉe alta rapideco, sed tio postulas pli bonan transmision por atingi ĉi tiun efikon
C. Ne eblas monitori- ordinaraj paŝomotoroj ne povas detekti/retrosendi la nunan pozicion de la motoro, ni nomas ĝin "malferma buklo", se vi bezonas "fermitan buklon" kontrolon, vi devas instali kodigilon kaj pelilon, por ke vi povu monitori/kontroli la precizan rotacion de la motoro iam ajn, sed la kosto estas tre alta kaj ĝi ne taŭgas por ordinaraj produktoj
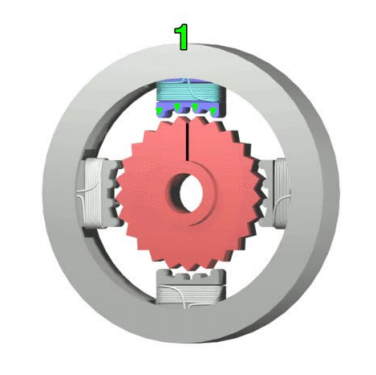
Paŝmotora Fazo
4. Klasifiko de paŝado:
Ekzistas multaj tipoj de paŝomotoroj, taŭgaj por diversaj situacioj.
Tamen, sub normalaj cirkonstancoj, PM-motoroj kaj hibridaj paŝomotoroj estas ĝenerale uzataj sen konsideri privatajn servilmotorojn.
5. Motorgrandeco:
La unua konsidero dum elektado de motoro estas la grandeco de la motoro. Paŝmotoroj varias de 4mm miniaturaj motoroj (uzataj por kontroli la movadon de fotiloj en inteligentaj telefonoj) ĝis gigantoj kiel NEMA 57.
La motoro havas funkcian tordmomanton, ĉi tiu tordmomanto determinas ĉu ĝi povas kontentigi vian bezonon pri motora potenco.
Ekzemple: NEMA17 estas ĝenerale uzata en 3D-printiloj kaj malgrandaj CNC-ekipaĵoj, kaj pli grandaj NEMA-motoroj estas uzataj en industria produktado.
NEMA17 ĉi tie rilatas al la ekstera diametro de la motoro, kiu estas 17 coloj, kio estas la grandeco de la colosistemo, kiu estas 43 cm kiam konvertite al centimetroj.
En Ĉinio, ni ĝenerale uzas centimetrojn kaj milimetrojn por mezuri dimensiojn, ne colojn.
6. Nombro de motoraj paŝoj:
La nombro da paŝoj po motora rivoluo determinas ĝian rezolucion kaj precizecon. Paŝmotoroj havas paŝojn de 4 ĝis 400 po rivoluo. Kutime oni uzas 24, 48 kaj 200 paŝojn.
Precizeco kutime priskribiĝas kiel la grado de ĉiu paŝo. Ekzemple, la paŝo de 48-paŝa motoro estas 7,5 gradoj.
Tamen, la malavantaĝoj de alta precizeco estas rapido kaj tordmomanto. Ĉe la sama frekvenco, la rapido de altprecizaj motoroj estas pli malalta.

7. Ŝanĝskatolo:
Alia maniero plibonigi precizecon kaj tordmomanton estas uzi rapidumujon.
Ekzemple, rapidumskatolo 32:1 povas konverti 8-ŝtupan motoron al 256-ŝtupa preciza motoro, samtempe pliigante la tordmomanton je 8 fojoj.
Sed la elira rapido estos koresponde reduktita al unu-okono de la originala.
Malgranda motoro ankaŭ povas atingi la efikon de alta tordmomanto per la redukta rapidumujo.
8. Ŝafto:
La lasta afero, kiun vi devas konsideri, estas kiel kongruigi la transmisian ŝafton de la motoro kaj kiel kongruigi vian transmisian sistemon.
La tipoj de ŝaftoj estas:
Ronda ŝafto / D-ŝafto: Ĉi tiu tipo de ŝafto estas la plej norma elira ŝafto, uzata por konekti puliojn, ilarojn, ktp. La D-ŝafto estas pli taŭga por alta tordmomanto por malhelpi glitadon.
Ilarŝafto: La elira ŝafto de iuj motoroj estas ilarŝafto, kiu estas uzata por kongrui kun specifa ilarsistemo
Ŝraŭba ŝafto: Motoro kun ŝraŭba ŝafto estas uzata por konstrui linian aktuatoron, kaj glitilo povas esti aldonita por atingi linian kontrolon
Bonvolu kontakti nin se vi interesiĝas pri iuj el niaj paŝomotoroj.
Afiŝtempo: 29-a de januaro 2022