Fermitcirkvitapaŝomotorojŝanĝis la rilatumon inter rendimento kaj kosto en multaj aplikoj de movada kontrolo. La sukceso de la fermitcirklaj progresemaj motoroj de VIC ankaŭ malfermis la eblecon anstataŭigi multekostajn servomotorojn per malaltkostajpaŝomotorojEn kreskanta nombro da altkvalitaj industriaj aŭtomatigaj aplikoj, teknologiaj progresoj ŝanĝas la rilatumon inter rendimento kaj kosto inter paŝomotoroj kaj servomotoroj.
Paŝmotoroj kontraŭ servomotoroj
Laŭ konvencia saĝo, servoregaj sistemoj funkcias pli bone en aplikoj kie necesas rapidoj super 800 RPM kaj alta dinamika respondo. Paŝmotoroj estas pli taŭgaj por aplikoj kun pli malaltaj rapidoj, malalta ĝis meza akcelo kaj alta tentordmomanto.
Do kio estas la bazo por ĉi tiu konvencia saĝo pri paŝomotoroj kaj servomotoroj? Ni analizu ĝin pli detale sube.
1. Simpleco kaj kosto
Paŝmotoroj estas ne nur pli malmultekostaj ol servomotoroj, sed ili ankaŭ estas pli simplaj por komisii kaj prizorgi. Paŝmotoroj estas stabilaj dum starado kaj tenas sian pozicion (eĉ kun dinamikaj ŝarĝoj). Tamen, se pli alta rendimento estas bezonata por certaj aplikoj, pli multekostaj kaj kompleksaj servomotoroj devas esti uzataj.
2. Strukturo
Paŝmotorojrotacii laŭpaŝe, uzante magnetajn volvaĵojn por iom post iom tiri magneton de unu pozicio al la sekva. Por movi la motoron 100 poziciojn en iu ajn direkto, la cirkvito postulas 100 paŝooperaciojn sur la motoro. Paŝmotoroj uzas pulsojn por atingi pliigajn movojn, permesante precizan poziciigon sen la uzo de iuj ajn retrosensiloj.
La movmetodo de la servomotoro estas malsama. Ĝi konektas pozician sensilon - t.e., kodigilon - al la magneta rotoro kaj kontinue detektas la precizan pozicion de la motoro. La servomonitoras la diferencon inter la efektiva pozicio de la motoro kaj la komandita pozicio kaj ĝustigas la kurenton laŭe. Ĉi tiu fermitcirkvita sistemo tenas la motoron en la ĝusta movstato.

3. Rapido kaj tordmomanto
La diferenco en rendimento inter paŝomotoroj kaj servomotoroj devenas de iliaj malsamaj motordezajnaj solvoj.Paŝmotorojhavas multe pli grandan nombron da poloj ol servomotoroj, do plena rivoluo de paŝomotoro postulas multe pli da interŝanĝoj de volvaĵoj, rezultante en rapida falo de tordmomanto ĉe kreskantaj rapidoj. Krome, se la maksimuma tordmomanto estas atingita, la paŝomotoro povas perdi sian funkcion de rapidsinkronigo. Pro ĉi tiuj kialoj, servomotoroj estas la preferata solvo en plej multaj altrapidaj aplikoj. Kontraste, la pli alta nombro da poloj de paŝomotoro estas avantaĝa ĉe pli malaltaj rapidoj, kiam la paŝomotoro havas tordmomantan avantaĝon super servomotoro de la sama grandeco.
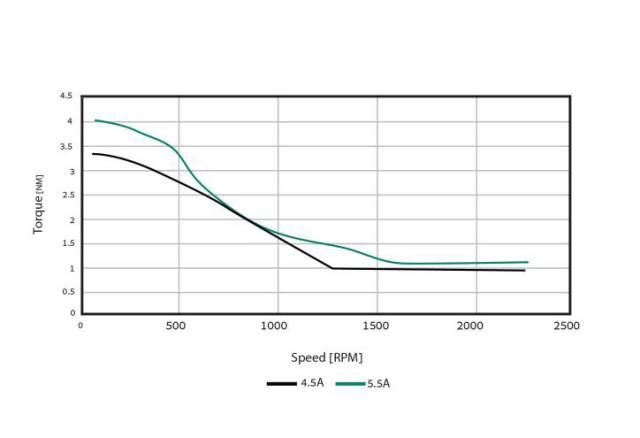
Dum la rapido pliiĝas, la tordmomanto de la paŝomotoro malpliiĝas
4. Poziciigo
Ekzistas gravaj diferencoj inter paŝomotoroj kaj servomotoroj en aplikoj kie la preciza pozicio de la maŝino devas esti konata ĉiam. En malferma-cirkvitaj movaj aplikoj kontrolitaj per paŝomotoroj, la stirsistemo supozas, ke la motoro ĉiam estas en la ĝusta moviĝstato. Tamen, post kiam problemo estas renkontita, kiel ekzemple haltiĝinta motoro pro blokita komponento, la regilo ne kapablas scii la faktan pozicion de la maŝino, kio povas konduki al perdo de pozicio. La fermitcirkvita sistemo de la servomotoro mem havas avantaĝon: se ĝi estas blokita de objekto, ĝi tuj detektos ĝin. La maŝino ĉesos funkcii kaj neniam estos ekster sia pozicio.
5. Varmo- kaj energikonsumo
Malfermcirkvitaj paŝomotoroj uzas fiksan kurenton kaj elsendas multe da varmo. Fermitcirkvitaj paŝomotoroj nur provizas la kurenton bezonatan por la rapidbuklo kaj tial evitas la problemon de motorvarmiĝo.
Kompara resumo
Servoregiloj plej bone taŭgas por altrapidaj aplikoj, kiuj implikas dinamikajn ŝarĝŝanĝojn, kiel ekzemple robotaj brakoj. Paŝmotoraj regiloj, aliflanke, pli taŭgas por aplikoj postulantaj malaltan ĝis mezan akceladon kaj altan tenmomanton, kiel ekzemple 3D-printiloj, transportiloj, subaksoj ktp. Ĉar paŝomotoroj estas pli malmultekostaj, ili povas redukti la koston de aŭtomatigaj sistemoj kiam uzataj. Moviĝregiloj, kiuj bezonas utiligi la karakterizaĵojn de servomotoroj, devos pruvi, ke ĉi tiuj pli multekostaj motoroj valoras sian pezon en oro.
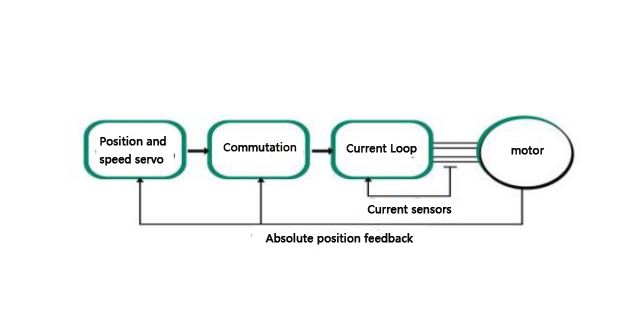
Paŝmotoroj kun fermitcirkvita kontrolo
La paŝomotoro kun integrita elektronika kontrolo estas la ekvivalento de dufaza senbroŝa kontinukurenta motoro kaj povas plenumi pozician buklokontrolon, rapidbuklokontrolon, DQ-kontrolon kaj aliajn algoritmojn. Unuturna absoluta kodigilo estas uzata por fermitcirkvita komutado, tiel certigante optimuman tordmomanton ĉe iu ajn rapideco.
Malalta energikonsumo kaj konservado de malvarmeto
VIC-paŝmotoroj estas tre energiefikaj. Male al malferma-cirkvitaj paŝmotoroj, kiuj ĉiam funkcias per plena kurentkomando kaj kaŭzas varmo- kaj bruoproblemojn, la kurento ŝanĝiĝas laŭ la faktaj kondiĉoj de la movado, ekzemple dum akcelo kaj malakcelo. Simile al servomotoroj, la kurento konsumita de ĉi tiuj paŝmotoroj en iu ajn momento estas proporcia al la efektiva bezonata tordmomanto. Ĉar la motoro kaj la integrita elektronika kontrolplato funkcias pli malvarme, VIC-paŝmotoroj povas atingi pli altajn pintajn tordmomantojn kompareblajn al servomotoroj.
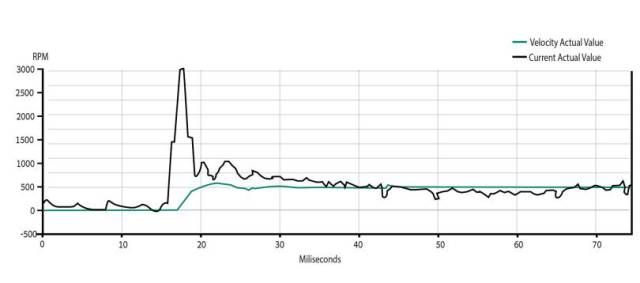
Eĉ ĉe altaj rapidoj, VIC-paŝmotoroj postulas malpli da kurento
Pelitaj de progresoj en fermitcirkvita teknologio, paŝomotoroj kapablas penetri alt-efikecajn, altrapidajn aplikojn, kiuj antaŭe apartenis ekskluzive al servomotoroj.
Paŝmotoroj kun fermitcirkvita teknologio
Kio se la avantaĝoj de fermitcirkvita servoteknologio povus esti aplikitaj al paŝomotoroj?
Ĉu ni povus atingi kompareblan rendimenton al servomotoroj, samtempe profitante de la kostavantaĝoj de paŝomotoroj?
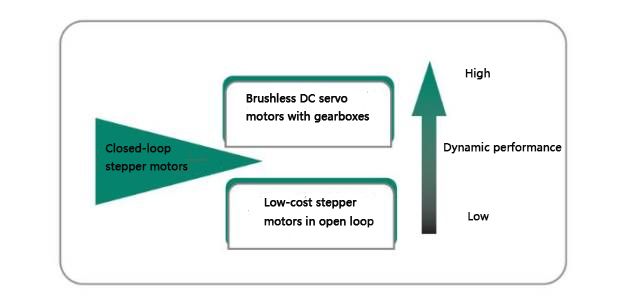
Kombinante fermitcirklan stirteknologion, la paŝmotoro fariĝus ampleksa produkto kun la avantaĝoj de kaj servomotoroj kaj paŝmotoroj je malalta kosto. Ĉar fermitcirklaj paŝmotoroj ofertas signifajn plibonigojn en rendimento kaj energiefikeco, ili povas anstataŭigi pli multekostajn servomotorojn en kreskanta nombro da altkvalitaj aplikoj.
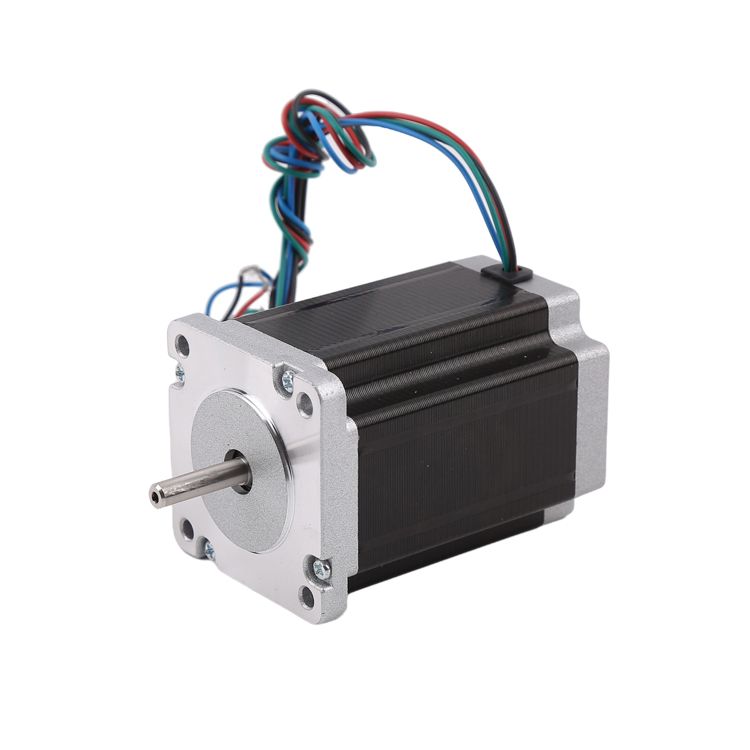
La sekvanta estas ekzemplo de VIC-integra paŝomotoro kun enigita fermitcirkvita kontrolo por klarigi la funkciadon kaj avantaĝojn kaj malavantaĝojn de paŝomotoroj kun fermitcirkvita teknologio.
Precize kongruaj rendimentaj postuloj
Por certigi sufiĉan tordmomanton por superi perturbojn kaj eviti perditajn paŝojn, malfermbuklaj paŝomotoroj kutime bezonas certigi, ke la tordmomanto estas almenaŭ 40% pli alta ol la valoro postulata de la apliko. Fermitbuklaj hodiaŭaj paŝomotoroj ne havas ĉi tiun problemon. Kiam ĉi tiuj paŝomotoroj haltas pro troŝarĝo, ili daŭre teni la ŝarĝon sen perdi tordmomanton. Ili daŭre funkcios post kiam la troŝarĝa kondiĉo estas forigita. Maksimuma tordmomanto povas esti garantiita ĉe iu ajn donita rapideco kaj la pozicia sensilo certigas, ke ne estas perdo de paŝo. Fermitbuklaj paŝomotoroj povas tial esti specifitaj por precize kongrui kun la tordmomantaj postuloj de la koncerna apliko sen la bezono de plia 40% marĝeno.
Kun malferma-cirkvitaj paŝomotoroj, malfacilas plenumi altajn tujajn tordmomantajn postulojn pro la risko de perditaj paŝoj. Kompare kun konvenciaj paŝomotoroj, VIC-fermit-cirkvitaj paŝomotoroj povas atingi tre rapidan akcelon, malaltan funkcian bruon kaj malaltan resonancon. Ili povas funkcii je multe pli altaj bendlarĝoj kaj atingi bonegan rendimenton.
Neniu ŝranko
Toda integras la stirplaton de la transmisio kun la motoro, reduktante la kvanton da drataro kaj simpligante la efektivigan solvon. Kun toda, vi povas konstrui maŝinojn sen ŝrankoj.
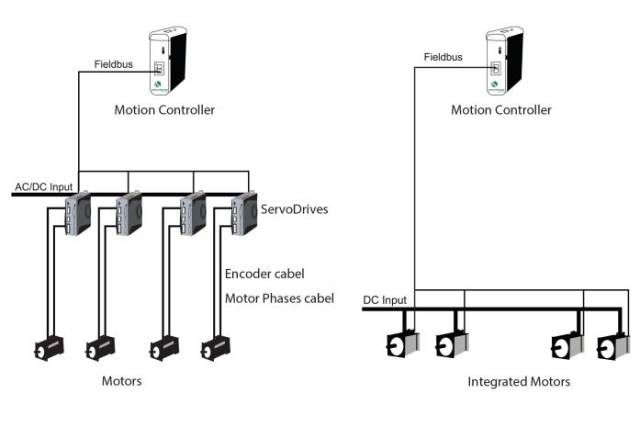
Integri elektronikon kun paŝomotoroj reduktas kompleksecon
Kun fermitcirkvita teknologio, fermitcirkvitaj paŝomotoroj ofertas al uzantoj bonegan precizecon kaj efikecon, kun la funkciado de servomotoro kaj la malalta kosto de paŝomotoro. Malpli multekostaj paŝomotoroj iom post iom penetras aplikojn, kiujn alie dominis altkostaj servomotoroj.
Afiŝtempo: 10-a de aprilo 2023