Paŝmotoro estas elektromotoro, kiu konvertas elektran energion en mekanikan energion, kaj ĝia elira tordmomanto kaj rapideco povas esti precize kontrolitaj per kontrolado de la elektroprovizo.
Mi, la avantaĝoj de paŝomotoro
Alta precizeco
La rotacia angulo de la paŝomotoro estas proporcia al la nombro de eniraj pulsoj, do eblas precize kontroli la nombron kaj frekvencon de pulsoj por atingi precizan kontrolon de la motorpozicio kaj rapido. Ĉi tiu karakterizaĵo igas paŝomotorojn elstari en aplikoj, kiuj postulas altprecizan poziciigadon, kiel ekzemple CNC-maŝiniloj, presiloj kaj tekstilaj maŝinoj.
Paŝmotoroj kutime havas precizecon inter 3% kaj 5% po paŝo kaj ne akumulas la eraron de la antaŭa paŝo al la sekva, t.e. ili ne generas akumulajn erarojn. Tio signifas, ke paŝmotoroj kapablas konservi altan pozician precizecon kaj movrapideblon dum longaj tempoperiodoj aŭ kontinua moviĝo.
Tre kontrolebla

La funkciado de paŝomotoro estas atingita per kontrolado de la pulsa kurento, do la kontrolo de la motoro povas esti realigita per programara programado. Ĉi tiu programebleco permesas al paŝomotoroj plenumi la bezonojn de vasta gamo da aplikoj, kiel ekzemple aŭtomatigitaj produktadlinioj, robotiko kaj aliaj kampoj.
Ĉar la respondo de la paŝomotoro estas determinita nur per la enira pulso, oni povas uzi malfermbuklan kontrolon, kiu simpligas kaj malpli kostigas la kontrolon de la motoro. Malfermbukla kontrolo ankaŭ reduktas sisteman kompleksecon kaj bontenajn kostojn.
Alta tordmomanto ĉe malaltaj rapidecoj
Paŝmotoroj havas altan tordmomantan eliron je malaltaj rapidoj, kio igas ilin bonegaj en aplikoj, kiuj postulas malaltan rapidon kaj altan tordmomanton, kiel ekzemple aŭtomataj etikedmaŝinoj kaj pakmaŝinoj.
Paŝmotoroj havas maksimuman tordmomanton kiam haltitaj, trajto kiu igas ilin avantaĝaj en aplikoj kie pozicia stabileco aŭ rezisto al eksteraj ŝarĝoj estas necesaj.
Alta fidindeco

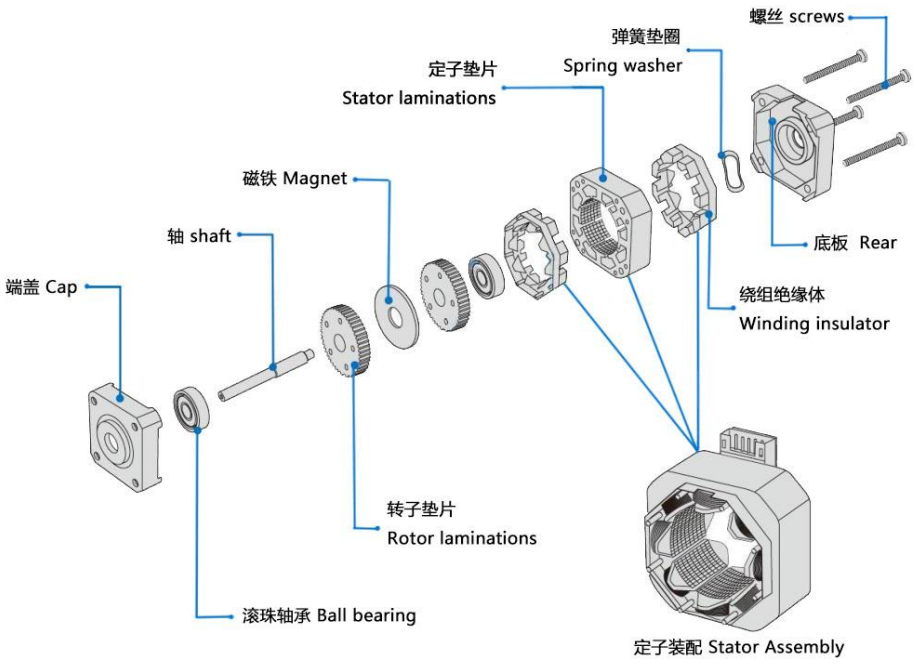
Paŝmotoroj ne havas brosojn, tiel reduktante paneojn kaj bruon pro bros-eluziĝo. Tio faras paŝmotorojn tre fidindaj, kaj la vivdaŭro de la motoro plejparte dependas de la vivdaŭro de la pendaĵoj.
Paŝmotoroj havas simplan strukturon, konsistantan el tri partoj: la motoro mem, la pelilo kaj la regilo, kio faras instaladon kaj bontenadon relative facilaj.
Larĝa rapidintervalo

Paŝmotoroj havas relative rapidan rapidintervalon, kaj la rapido de la motoro povas esti ŝanĝita per agordo de la pulsfrekvenco. Tio permesas al la paŝmotoro adaptiĝi al malsamaj laborrapidoj kaj ŝarĝpostuloj.
Bona Komenco-Halto kaj Inversa Respondo
Paŝmotoroj respondas rapide al stiraj signaloj dum startado kaj haltado, kaj konservas altan precizecon kaj stabilecon dum inversado. Ĉi tiu trajto igas la paŝomotoron avantaĝo, ĉar ĝi bezonas oftajn startojn kaj haltojn kaj inversigojn dum apliko.
II, la malavantaĝoj de paŝomotoroj
Facile perdi paŝon aŭ transpaŝi
Se ne konvene kontrolataj, paŝomotoroj estas sentemaj al troa aŭ malpaŝa mispaŝo. Malpaŝa signifas, ke la motoro ne rotacias laŭ antaŭdifinita nombro da paŝoj, dum malpaŝa signifas, ke la motoro rotacias pli ol antaŭdifinita nombro da paŝoj. Ambaŭ ĉi tiuj fenomenoj rezultigas perdon de pozicia precizeco de la motoro kaj influas la rendimenton de la sistemo.
La generado de paŝomalkongrua kaj tropaŝa rilatas al faktoroj kiel la ŝarĝo de la motoro, la rotacia rapido, kaj la frekvenco kaj amplitudo de la stirsignalo. Tial, kiam oni uzas paŝomotorojn, oni devas zorge konsideri ĉi tiujn faktorojn kaj preni taŭgajn mezurojn por eviti la okazon de paŝomalkongrua kaj tropaŝa.
Malfacileco atingi altajn rotaciajn rapidojn
La rotacia rapido de paŝomotoro estas limigita de ĝia funkcianta principo, kaj kutime malfacilas atingi altan rotacian rapidon. Kvankam eblas pliigi la rapidon de la motoro per pliigo de la frekvenco de la stirsignalo, tro alta frekvenco kondukos al problemoj kiel motorvarmiĝo, pliigita bruo kaj eĉ povas difekti la motoron.
Tial, kiam oni uzas paŝomotorojn, necesas elekti la taŭgan rapidintervalon laŭ la postuloj de la apliko kaj eviti funkcii je altaj rapidoj dum longaj tempoperiodoj.
Sentema al ŝarĝŝanĝoj
Paŝmotoroj postulas realtempan kontrolon de la nombro kaj frekvenco de kurentpulsoj dum funkciado por certigi precizan kontrolon de pozicio kaj rapido. Tamen, en kazo de grandaj ŝarĝŝanĝoj, la kontrolkurenta pulso estos ĝenata, rezultante en malstabila movado kaj eĉ senbrida paŝomovado.
Por solvi ĉi tiun problemon, oni povas uzi fermitcirklan regsistemon por monitori la pozicion kaj rapidon de la motoro kaj ĝustigi la regsignalon laŭ la efektiva situacio. Tamen, tio pliigos la kompleksecon kaj koston de la sistemo.
Malalta efikeco
Ĉar paŝomotoroj estas kontrolataj inter konstanta haltado kaj startado, ilia efikeco estas relative malalta kompare kun aliaj specoj de motoroj (ekz. kontinukurenta motoro, alterna kurenta motoro, ktp.). Tio signifas, ke paŝomotoroj konsumas pli da potenco por la sama elira potenco.
Por plibonigi la efikecon de paŝomotoroj, oni povas uzi rimedojn kiel optimumigi la kontrolajn algoritmojn kaj redukti motorperdojn. Tamen, la efektivigo de ĉi tiuj rimedoj postulas certan nivelon de teknologio kaj kostinvestoj.
III, la aplikokampo de paŝomotoroj:
Paŝmotoroj estas vaste uzataj en multaj kampoj pro siaj unikaj avantaĝoj kaj certaj limigoj. Jen detala diskuto pri la aplikokampo de paŝomotoroj:
Robotiko kaj aŭtomatigaj sistemoj
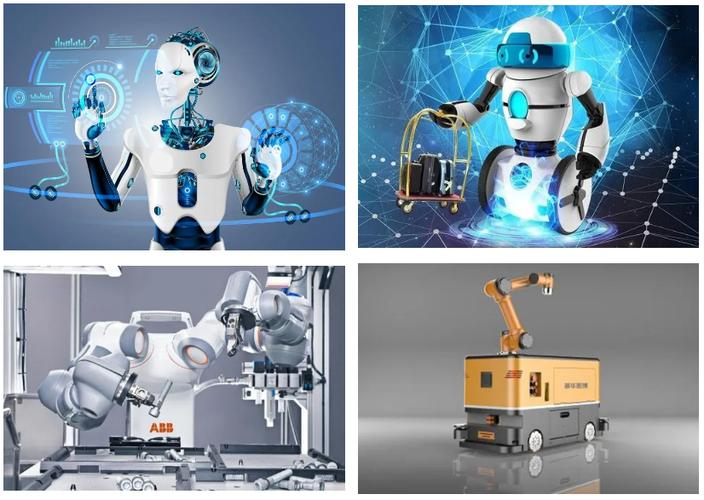
Paŝmotoroj estas vaste uzataj en industriaj robotoj, aŭtomataj produktadlinioj kaj aliaj kampoj. Ili povas precize kontroli la moviĝrapidon kaj direkton de robotoj kaj realigi altprecizan poziciigadon kaj rapidan respondon en aŭtomataj produktadprocezoj.
CNC-Maŝinoj

Presiloj

Paŝmotoroj estas uzataj por kontroli la movadon de la preskapo en aparatoj kiel inkjet- kaj laserprintiloj. Per preciza kontrolado de la movado de la motoro, oni povas realigi altkvalitan teksto- kaj bildopresadon. Ĉi tiu trajto igas paŝmotorojn vaste uzataj en presaj ekipaĵoj.
Medicinaj Aparatoj

Paŝmotoroj estas uzataj en medicinaj bildigaj ekipaĵoj (ekz. rentgenaj aparatoj, komputilaj tomografioj, ktp.) por funkciigi la movadon de la skanadkadro. Per preciza kontrolado de la movado de la motoro, oni povas realigi rapidan kaj precizan bildigon de la paciento. Ĉi tiu trajto igas paŝmotorojn ludi gravan rolon en medicinaj ekipaĵoj.
Aerospaco

Paŝmotoroj estas uzataj por kontroli la moviĝon de aktuatoroj en aerspaca ekipaĵo kiel satelita orientiĝo-kontrolo kaj raketo-propulsaj sistemoj. Paŝmotoroj montras bonan funkciadon sub la postuloj de alta precizeco kaj alta stabileco. Ĉi tiu karakterizaĵo faras paŝmotorojn grava parto de la aerspaca kampo.
Distra kaj Luda Ekipaĵo

Paŝmotoroj estas uzataj por kontroli la movadon de aktuatoroj en aparatoj kiel laseraj gravurmaŝinoj, 3D-printiloj kaj ludregiloj. En ĉi tiuj aparatoj, preciza kontrolo de paŝmotoroj estas kritika por atingi altkvalitan produkton kaj bonegan uzantosperton.
Edukado kaj Esplorado

Paŝmotoroj estas uzataj por kontroli la movadon de eksperimentaj platformoj en scenaroj kiel laboratorio-instrumentoj kaj instrua ekipaĵo. En edukado, la malalta kosto kaj alta precizeco de paŝmotoroj igas ilin idealaj instruiloj. Utiligante la precizajn stirajn karakterizaĵojn de paŝmotoroj, ili povas helpi studentojn pli bone kompreni fizikajn kaj inĝenierajn principojn.
Resumante, paŝomotoroj havas la avantaĝojn de alta precizeco, stirebleco, malalta rapido kaj alta tordmomanto, kaj alta fidindeco, sed ili ankaŭ havas la malavantaĝojn de facileco de ŝanĝo de paŝo, malfacile atingeblaj altaj rotaciaj rapidoj, sentemaj al ŝarĝŝanĝoj, kaj malalta efikeco. Kiam oni elektas paŝomotorojn, necesas konsideri iliajn avantaĝojn kaj malavantaĝojn same kiel la aplikan amplekson laŭ la aplikaj postuloj por certigi la funkciadon kaj stabilecon de la sistemo.
Afiŝtempo: 14-Nov-2024