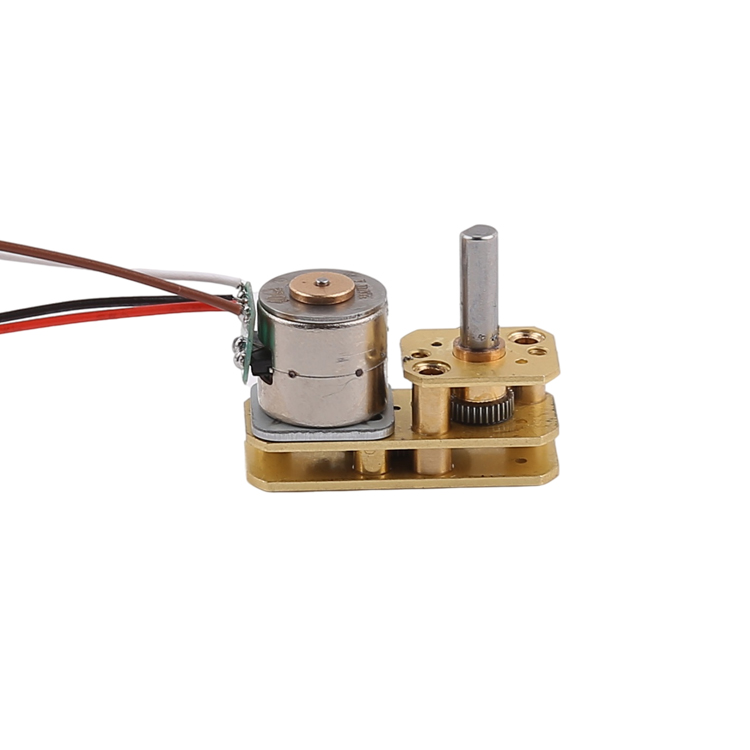
Kiam ni miras pri la preciza monitorado de sandatumoj per inteligentaj horloĝoj aŭ spektas filmetojn de mikrorobotoj lerte trairantaj mallarĝajn spacojn, malmultaj homoj atentas la kernan movan forton malantaŭ ĉi tiuj teknologiaj mirindaĵoj - la ultramikro-paŝmotoron. Ĉi tiuj precizaj aparatoj, kiuj estas preskaŭ nedistingeblaj per la nuda okulo, kviete pelas silentan teknologian revolucion.
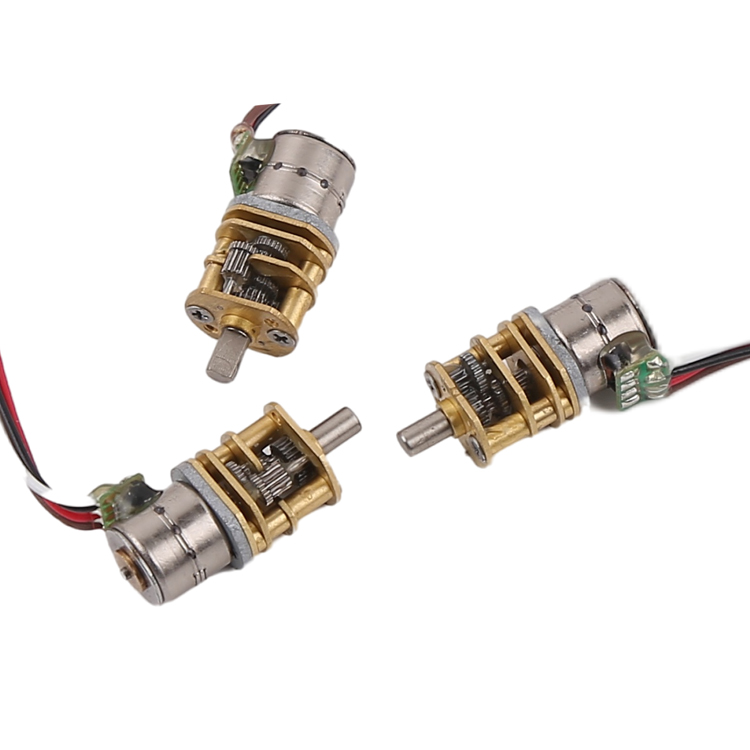
Tamen, fundamenta demando kuŝas antaŭ inĝenieroj kaj sciencistoj: kie precize estas la limo de mikro-paŝmotoroj? Kiam la grandeco estas reduktita al milimetra aŭ eĉ mikrometra nivelo, ni alfrontas ne nur la defion de fabrikadaj procezoj, sed ankaŭ la limojn de fizikaj leĝoj. Ĉi tiu artikolo profundiĝos en la pintnivelajn evoluojn de la sekva generacio de ultra-mikro-paŝmotoroj kaj rivelos ilian grandegan potencialon en la kampoj de porteblaj aparatoj kaj mikro-robotoj.
Mi.Alproksimiĝante al fizikaj limoj: tri gravaj teknologiaj defioj alfrontataj de ultraminiaturigo
1.La Kuba Paradokso de Tordmomanta Denseco kaj Grandeco
La tordmomanto de tradiciaj motoroj estas proksimume proporcia al ilia volumeno (kuba grandeco). Kiam la grandeco de la motoro estas reduktita de centimetroj al milimetroj, ĝia volumeno akre malpliiĝos al la tria potenco, kaj la tordmomanto akre falos. Tamen, la redukto de ŝarĝrezisto (kiel ekzemple frikcio) estas malproksima de signifa, kondukante al tio, ke la ĉefa kontraŭdiro en la procezo de ultraminiaturigo estas la nekapablo de malgranda ĉevalo tiri malgrandan aŭton.
2. Efikeca Klifo: Kerna Perdo kaj Kupra Volvaĵa Dilemo
Kerna perdo: Tradiciaj siliciaj ŝtalaj lamenoj estas malfacile prilaboreblaj je ultramikroskalo, kaj la kirloflua efiko dum altfrekvenca operacio kondukas al akra falo de efikeco.
Limigo de kupra volvaĵo: La nombro da volvaĵoj en la bobeno malpliiĝas akre kiam la grandeco ŝrumpas, sed la rezisto pliiĝas akre, farante I² R kupro perdo la ĉefa varmofonto
Defio de varmodisradiado: La malgranda volumeno rezultigas ekstreme malaltan varmokapaciton, kaj eĉ eta trovarmiĝo povas difekti apudajn precizajn elektronikajn komponantojn.
3. La finfina testo de fabrikada precizeco kaj konsistenco
Kiam la distanco inter la statoro kaj rotoro devas esti kontrolita je mikrometra nivelo, tradiciaj maŝinadprocezoj alfrontas limigojn. Nekonsiderindaj faktoroj en la makroskopa mondo, kiel polvopartikloj kaj internaj streĉoj en materialoj, povas fariĝi rendimentaj malhelpantoj je mikroskopa skalo.
II.Rompante la limojn: kvar novigaj direktoj por la sekva generacio de ultra-mikro-paŝmotoroj

1. Senkerna motorteknologio: Diru adiaŭ al ferdamaĝo kaj ampleksu efikecon
Adoptante senkernan kavan tasforman dezajnon, ĝi tute eliminas kirlofluajn perdojn kaj histerezajn efikojn. Ĉi tiu tipo de motoro uzas sendentan strukturon por atingi:
Ekstreme alta efikeco: energi-konvertefikeco povas atingi pli ol 90%
Nula ŝov-efiko: ekstreme glata funkciado, preciza kontrolo de ĉiu 'mikropaŝo'
Ultrarapida respondo: ekstreme malalta rotora inercio, komenco-halto povas esti kompletigita ene de milisekundoj
Reprezentaj aplikoj: haptik-religaj motoroj por altkvalitaj inteligentaj horloĝoj, precizaj medikamentenhavaj sistemoj por implanteblaj medicinaj pumpiloj
2. Piezoelektra ceramika motoro: anstataŭigu "rotacion" per "vibrado"
Rompante la limojn de elektromagnetaj principoj kaj utiligante la inversan piezoelektran efikon de piezoelektraj ceramikaĵoj, la rotoro estas movata per mikrovibradoj je ultrasonaj frekvencoj.
Duobliganta tordmomantdensecon: Sub la sama volumeno, la tordmomanto povas atingi 5-10 fojojn tiun de tradiciaj elektromagnetaj motoroj
Memŝlosa kapablo: aŭtomate konservas pozicion post elektropaneo, multe reduktante la energikonsumon en atendovico
Bonega elektromagneta kongruo: ne generas elektromagnetan interferon, aparte taŭga por precizaj medicinaj instrumentoj
Reprezentaj aplikoj: Preciza fokusa sistemo por endoskopaj lensoj, nanoskala poziciigado por platformoj por detekto de ĉipoj
3. Mikroelektromekanika sistemteknologio: de "fabrikado" ĝis "kresko"
Uzante duonkonduktaĵan teknologion, ĉizu kompletan motorsistemon sur silicia oblato:
Aro-fabrikado: kapabla prilabori milojn da motoroj samtempe, signife reduktante kostojn
Integra dezajno: Integrante sensilojn, ŝoforojn kaj motorkorpojn sur unuopan peceton
Grandec-supreniro: puŝante motorgrandecon en la submilimetran kampon
Reprezentaj aplikoj: Celitaj mikrorobotoj por liverado de medikamentoj, distribuita medio-monitorado de "inteligenta polvo"
4. Nova Materiala Revolucio: Preter Silicia Ŝtalo kaj Permanentaj Magnetoj
Amorfa metalo: ekstreme alta magneta permeablo kaj malalta ferperdo, rompante la rendimentan plafonon de tradiciaj siliciaj ŝtalplatoj
Apliko de dudimensiaj materialoj: Grafeno kaj aliaj materialoj estas uzataj por fabriki ultramaldikajn izolajn tavolojn kaj efikajn varmodisradiajn kanalojn.
Esplorado de Superkonduktiveco je Alta Temperaturo: Kvankam ankoraŭ en la laboratorio-fazo, ĝi anoncas la finfinan solvon por nul-rezistancaj volvaĵoj
III.Estontaj aplikaj scenaroj: Kiam miniaturigo renkontas inteligentecon
1. La nevidebla revolucio de porteblaj aparatoj
La sekva generacio de ultra-mikro-paŝmotoroj estos plene integrita en ŝtofojn kaj akcesoraĵojn:
Inteligentaj kontaktlensoj: Mikromotoro funkciigas la enkonstruitan lensan zumon, atingante senjuntan ŝaltadon inter pliigita realo (AR)/virtuala realo (VR) kaj realo.
Vestaĵoj kun haptika retrosciigo: centoj da mikro-palpaj punktoj distribuitaj tra la korpo, atingante realisman palpan simuladon en virtuala realeco
Sanmonitora peceto: motor-movita mikronadla aro por sendolora sangoglukoza monitorado kaj transhaŭta medikamentliverado
2. Svarma Inteligenteco de Mikrorobotoj
Medicinaj nanorobotoj: Miloj da mikrorobotoj portantaj medikamentojn, kiuj precize lokalizas tumorareojn sub la gvido de magnetaj kampoj aŭ kemiaj gradientoj, kaj motor-movitaj mikroiloj plenumas kirurgiojn je ĉelnivelaj ĉeloj.
Industria testadareto: Ene de mallarĝaj spacoj kiel flugmotoroj kaj icocirkvitoj, grupoj de mikrorobotoj kunlaboras por transdoni realtempajn testadajn datumojn
Serĉu kaj savu sistemon de "fluganta formiko": miniatura roboto kun flugetantaj flugiloj, kiu imitas insektan flugon, ekipita per miniatura motoro por kontroli ĉiun flugilon, serĉante vivsignalojn en la ruinoj.
3. Ponto de homa-maŝina integriĝo
Inteligentaj protezoj: Bionaj fingroj kun dekoj da ultra-mikromotoroj enkonstruitaj, ĉiu artiko sendepende kontrolita, atingante precizan adaptan tenforton de ovoj ĝis klavaroj
Neŭrala interfaco: motor-movita mikroelektroda aro por preciza interagado kun neŭronoj en cerbo-komputila interfaco
IV.Estonta perspektivo: Defioj kaj ŝancoj kunekzistas

Kvankam la perspektivoj estas ekscitaj, la vojo al la perfekta ultra-mikro-paŝmotoro ankoraŭ estas plena de defioj:
Energia proplempunkto: La evoluo de bateria teknologio multe postrestas kompare kun la rapideco de miniaturigo de motoroj
Sistemintegriĝo: Kiel senjunte integri potencon, sensadon kaj kontrolon en la spacon
Aro-testado: Efika kvalita inspektado de milionoj da mikromotoroj restas industria defio.
Tamen, interfaka integriĝo akcelas la trarompon de ĉi tiuj limigoj. La profunda integriĝo de materialscienco, duonkonduktaĵa teknologio, artefarita inteligenteco kaj regteorio naskas antaŭe neimageblajn novajn aktuigsolvojn.
Konkludo: La fino de miniaturigo estas senfinaj eblecoj
La limo de ultramikropaŝmotoroj ne estas la fino de teknologio, sed la deirpunkto de novigado. Kiam ni rompas la fizikajn limojn de grandeco, ni fakte malfermas pordon al novaj aplikaj kampoj. En la proksima estonteco, ni eble ne plu nomos ilin "motoroj", sed "inteligentaj funkciigaj unuoj" - ili estos tiel molaj kiel muskoloj, tiel sentemaj kiel nervoj, kaj tiel inteligentaj kiel la vivo.
De medicinaj mikrorobotoj, kiuj precize liveras medikamentojn, ĝis inteligentaj porteblaj aparatoj, kiuj senjunte integriĝas en la ĉiutagan vivon, ĉi tiuj nevideblaj mikrofontoj de energio silente formas nian estontan vivmanieron. La vojaĝo de miniaturigo estas esence filozofia praktiko esplori kiel atingi pli da funkcioj per malpli da rimedoj, kaj ĝiaj limoj estas limigitaj nur de nia imagopovo.
Afiŝtempo: 9-a de oktobro 2025